Diffusion model-based approaches have shown promise in data-driven planning, but there are no safety guarantees,
thus making it hard to be applied for many safety-critical applications. To address these challenges, we propose a new method,
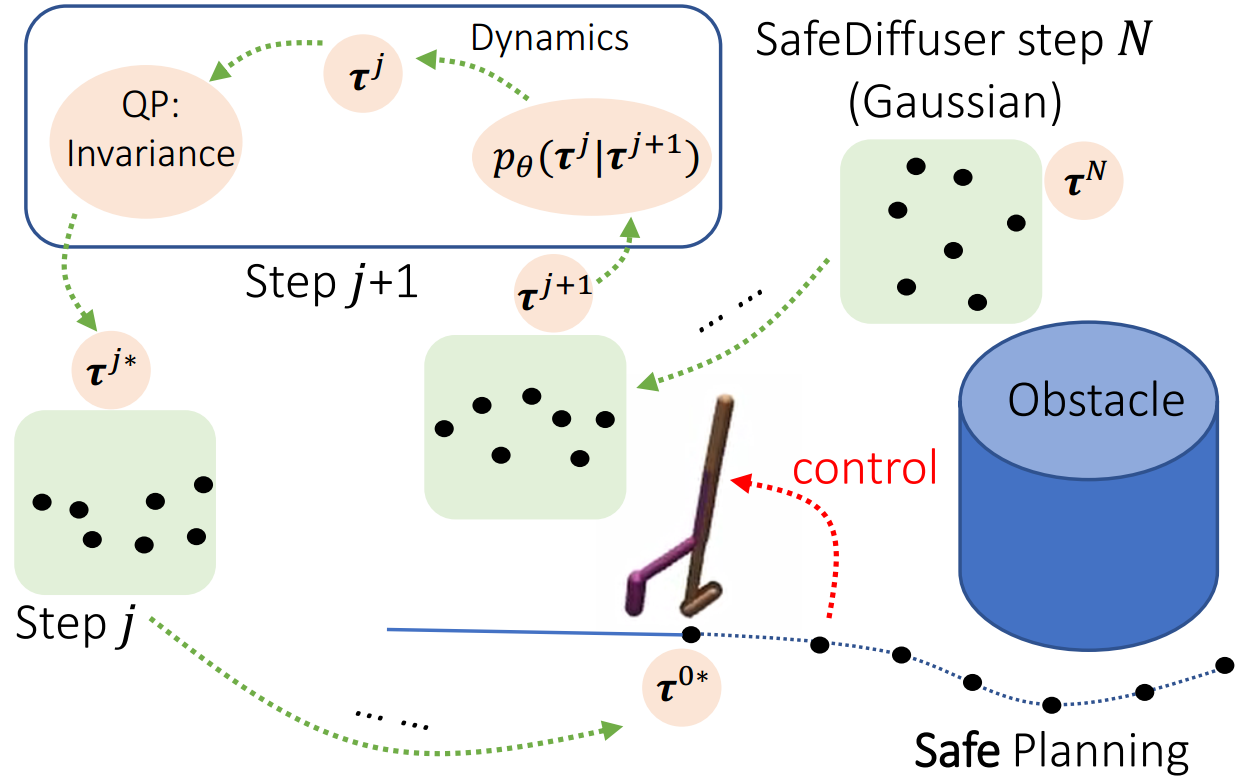
called SafeDiffuser, to ensure diffusion probabilistic models satisfy specifications by using a class of control barrier functions.
Safe Planning for Maze2D
In this experiment, we aim to impose trajectory constraints (red ellipses and super-ellipses below) on the planning path of a maze.
The diffusion model is conditioned on the initial positions and destinations.
For robot locomotion (in MuJoCo), we wish the robot to avoid collisions with obstacles, such as the roof (shown by the red lines below).
The SafeDiffuser predicts 6 controls and 17 states for Walker2D, and predicts 3 controls and 11 states for the Hopper.
Diffuser for Walker2D
replay
SafeDiffuser for Walker2D
Diffuser for Hopper.
replay
SafeDiffuser for Hopper.
Safe Planning for Manipulation
For manipulation (in Pybullet), the diffusion models generate joint trajectories (as controls) for the robot, which are conditioned on the locations of the objects to grasp and place.
Specifications are joint limitations to avoid collision in joint space.
The SafeDiffuser can achieve better reward when joint limitations are satisfied since no collision happens in joint space. Belows are three planning cases using SafeDiffuser.